Yao He

I am currently a second-year Master’s student and an incoming CS PhD student, both at Stanford. I work on computer vision and robotics. I work with Prof. Ehsan Adeli as part of the Stanford Translation AI Lab (STAI) and Stanford Vision and Learning (SVL). I also work closely with Prof. Youngjoong Kwon. I was also a member of the Toddlerbot team, advised by Prof. Shuran Song and Prof. Karen Liu.
Previously, I served as a research associate and one of the main engineers at AirLab, CMU Robotics Institute, advised by Prof. Sebastian Scherer. During my time at CMU, I was focusing on building effecient and versatile mobile robot systems that can robustly perceive and safely navigate in unstructured environments. I was also a 2021 CMU Robotics Institute Summer Scholar.
I received my Bachelor’s degree in Electronic Information Engineering from The Chinese University of Hong Kong, Shenzhen.
Research
-
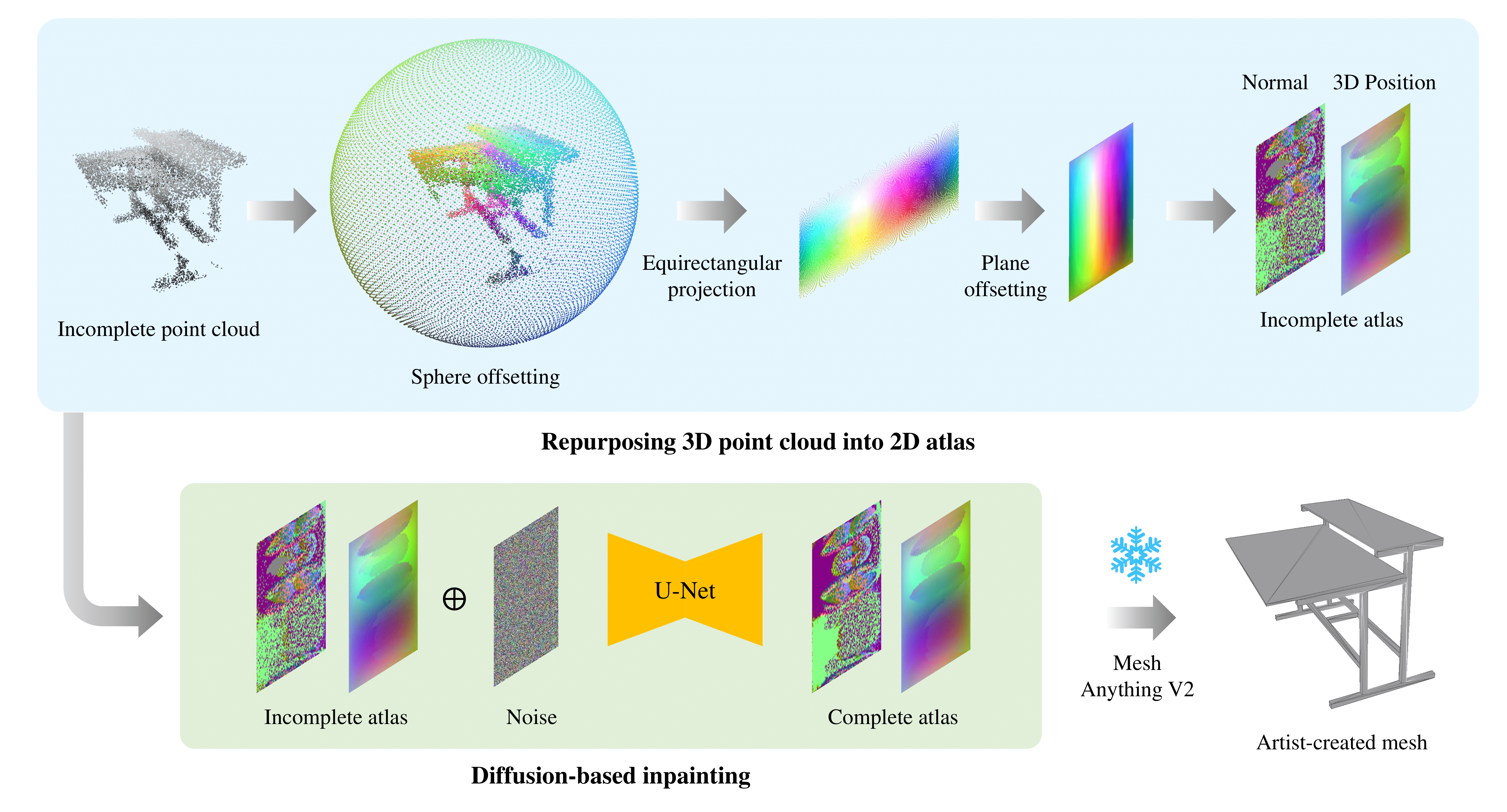 Artist-Created Mesh Generation from Raw ObservationIn International Conference on Computer Vision (ICCV) End-to-End 3D Learning workshop, 2025
Artist-Created Mesh Generation from Raw ObservationIn International Conference on Computer Vision (ICCV) End-to-End 3D Learning workshop, 2025


Teaching and Professional Service
Teaching Assistant:
- EE/CS 227 Robot Perception (Fall 2025) - Stanford
- MAT2002 Ordinary Differential Equations (Spring 2022) - CUHK-Shenzhen
- CSC3002 Introduction to Computer Science: Programming Paradigms (Spring 2021) - CUHK-Shenzhen
- MAT1002 Calculus II (Spring 2020) - CUHK-Shenzhen
- PHY1001 Mechanics (Fall 2019) - CUHK-Shenzhen
CMU MRSD Mentor: Resilient Subcanopy UAS Navigation Through Smoke for Wildfire Application (EmberEye)
Co-organized Events:
- Tartan Planning Series - Spring 2023 interactive series of talks, tutorials, and learning on Robot Planning
- ICCV 2023 SLAM Challenge - Multi-Robot, Multi-Degraded SLAM Challenge with TartanAir and SubT-MRS datasets
Reviewer: IJRR, RA-L, IROS, ICRA, CVPR





